Background
Underwater robotics is a field with diverse applications, including seabed exploration, environmental monitoring, and inspection/repair of subsea infrastructure. However, conventional rigid robots face challenges in flexibility and adaptability when interacting with complex underwater terrains, delicate marine life, or irregularly shaped objects. Particularly, grasping objects underwater requires both adaptability (flexibility) to conform to the object and high stiffness to hold it securely, which has been difficult to achieve simultaneously. Furthermore, underwater actuation demands significant energy, and power supply becomes a major constraint for long-duration missions. Organisms, especially soft-bodied creatures like octopuses, skillfully manipulate complex objects by changing the flexibility and stiffness of their tentacles at will. Inspired by these natural mechanisms, there has been a strong demand for the development of new underwater grippers.
Key Findings / Results
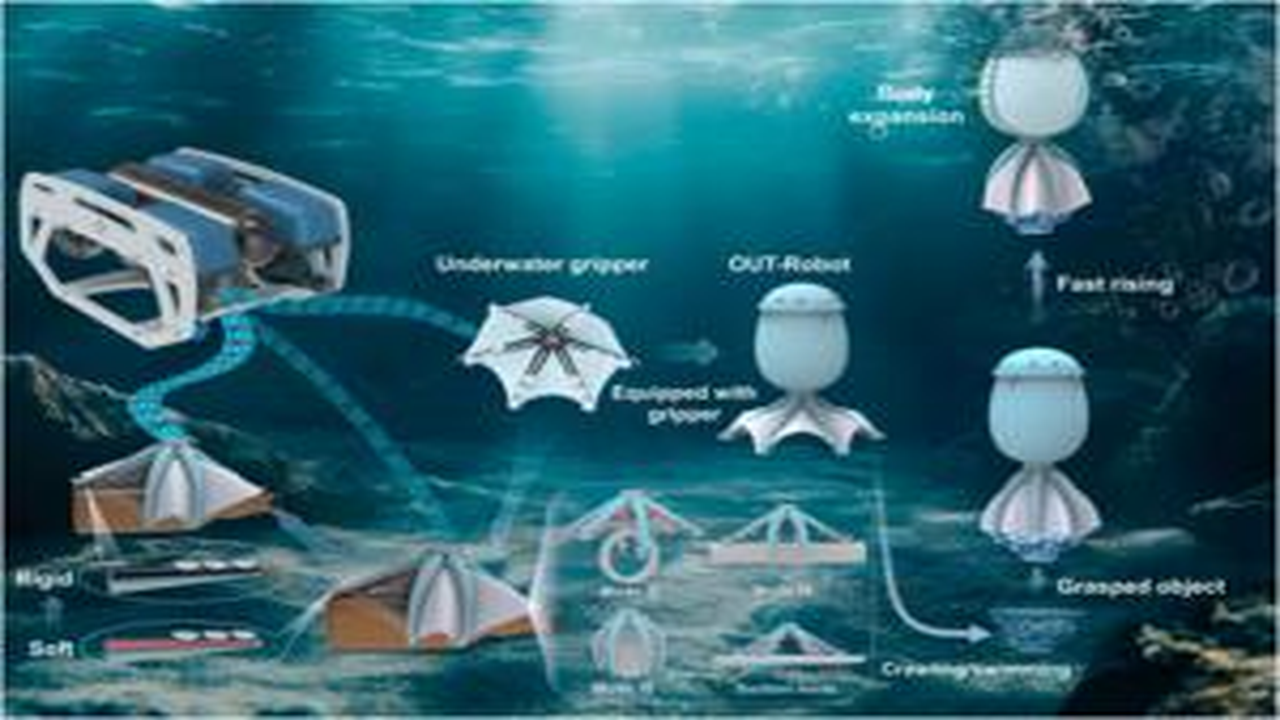
Inspired by octopus tentacles, a research team at Peking University has developed an innovative underwater gripper robot, the “Octopus-Inspired Upward Transport Robot (OUT-Robot),” capable of ultra-fast stiffness tuning and zero-energy object transport. This breakthrough is realized through the following key technical features:
- Shape Memory Polymer (SMP)-Based Variable Stiffness Arms: The gripper’s six flexible arms are embedded with polylactic acid (PLA), a type of shape memory polymer (SMP). PLA can switch between flexible and rigid states depending on temperature.
- Ultra-Fast Stiffness Tuning via Three-Layer Thermal Interface: To efficiently heat and cool the SMP, the research team developed a unique three-layer thermal interface. This interface consists of a heating element, a thermal diffusion layer, and an SMP layer, optimizing heat transfer. As a result, the gripper achieves remarkable performance, softening in just 1.3 seconds upon voltage application and hardening in an astonishing 0.8 seconds after heating ceases. This is among the fastest stiffness switching performances reported for SMP-based systems. A single arm with hardened SMP exhibits approximately 25 times higher stiffness than an arm without SMP.
- “Soft-Rigid Hybrid” Operation and Zero-Energy Shape Locking: The gripper conforms to objects in its flexible state and then rapidly hardens to firmly grasp them. This “soft-rigid hybrid” operation approach enables reliable grasping of even complex-shaped objects. Furthermore, once hardened, it possesses a “zero-energy shape locking” function, allowing it to maintain its stiffness without consuming additional energy. This enables objects to be transported during long underwater missions with minimal power consumption.
- Cooperative Grasping Force: With its six arms working cooperatively to grasp objects, the gripper achieved a grasping force of up to 4 Newtons (over approximately 400 grams). This force is sufficient for efficiently recovering various underwater objects, such as plastic waste.
Technical Significance & Outlook
The development of this octopus-inspired underwater gripper robot holds the potential to bring about a significant revolution in the field of underwater robotics. Its applications are diverse and are expected to contribute to areas such as:
- Environmental Cleanup: Recovery of plastic waste floating in the ocean and removal of debris from the seabed.
- Resource Recovery: Retrieval of seabed mineral resources and materials from shipwrecks.
- Seabed Exploration and Maintenance: Inspection of oil and gas facilities, cable laying, biodiversity surveys, etc.
Particularly, the ultra-fast stiffness tuning and zero-energy shape locking features dramatically enhance the feasibility of long-duration and autonomous underwater missions. This allows robots to perform more complex and challenging tasks while maintaining energy efficiency. Future challenges include long-term evaluation of SMP fatigue life, verification of durability in deeper and high-pressure underwater environments, and exploration of applicability to more complex manipulation tasks. This research serves as an excellent example of how bio-inspired design and advanced materials science can shape future robotics technology, providing indispensable tools for the preservation and utilization of sustainable marine environments.




Comments