Background: Advancements in Soft Robotics and Actuator Challenges
Soft robots, composed of flexible materials, hold significant promise for applications across various fields, including medicine, exploration, and human-robot collaboration, due to their ability to adapt to complex environments and safely handle delicate objects. However, designing actuators—the “muscles” that power soft robots—has been challenging. These actuators need to simultaneously achieve high power density, rapid response, and complex multi-directional deformation capabilities akin to human muscles. While 3D printing offers advantages in creating intricate shapes, the technology for integrating different functional materials to produce multi-functional actuators in a single step has been nascent.
Key Findings: Helically Aligned LCEs via Composite 3D Printing
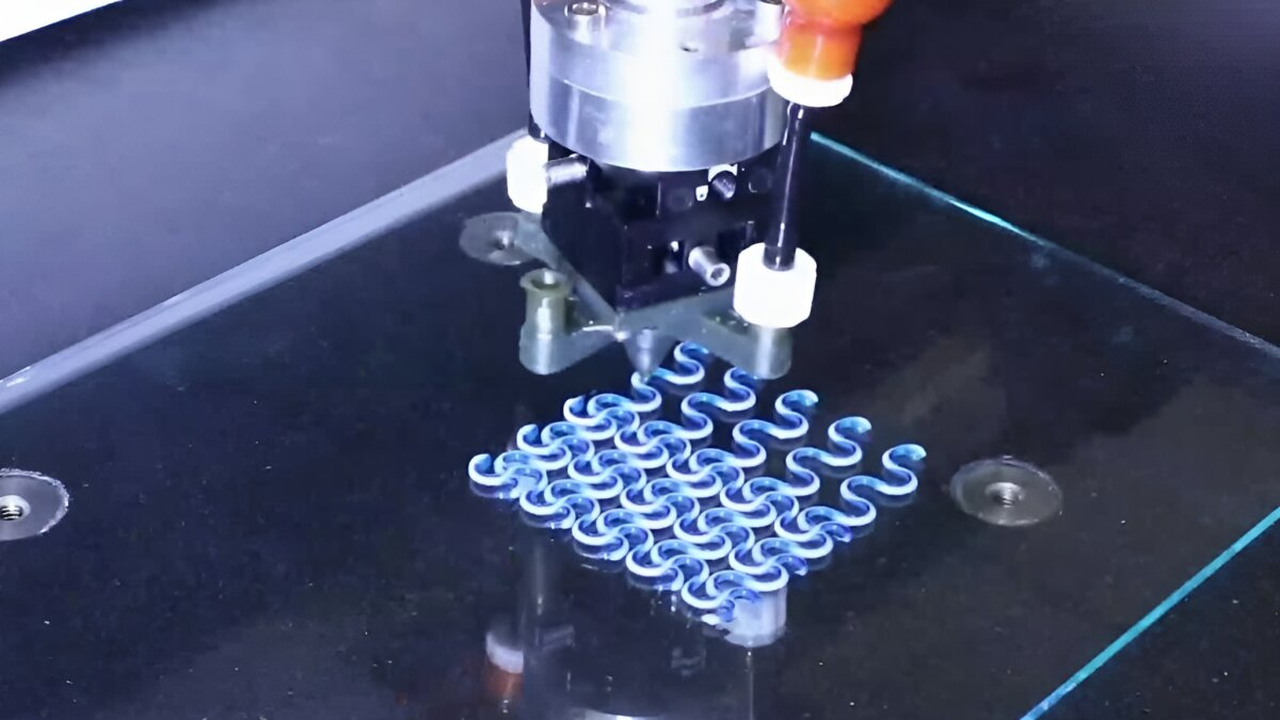
To address these challenges, a research team at Harvard University has developed an innovative technology for integrally 3D printing two types of flexible elastomers. At the core of this technology is the combination of “Liquid Crystal Elastomers (LCEs),” which contract in response to specific temperature changes, and “passive elastomers,” which provide structural stability and resist deformation. The researchers successfully used a custom-designed rotating nozzle to precisely align LCE molecules in a “helical” pattern during the 3D printing process. This helical alignment dramatically influences the actuator’s motion. While conventional LCE actuators were primarily limited to simple elongation or bending, the helical structure now enables the generation of complex, multi-directional deformations such as predictable and controlled twisting and bending in response to thermal stimuli. This breakthrough paves the way for creating “muscles” that mimic the intricate movements of a human arm or fingers using a single actuator.
Technical Significance and Outlook
This composite 3D printing technology opens new avenues for soft robot actuator design. The ability to precisely control the molecular alignment of LCEs allows for unprecedented customization of a robot’s direction, speed, and intensity of movement. This promises diverse applications, such as enhancing the ability of surgical robots to perform more delicate operations, enabling prosthetic limbs to achieve more natural movements, or allowing exploration robots navigating debris in disaster zones to adapt more flexibly to their environment. Furthermore, this technology accelerates the development of bio-inspired robots that mimic the complex functions of human muscles, laying the foundation for soft robots to perform a wider range of tasks. In the future, integrating thermal-responsive LCEs with other smart materials like photo-responsive or electro-responsive elements could lead to the creation of even more advanced and multi-functional artificial muscles.







Comments