Background: Advancing Soft Robotics Beyond Material Limitations
Traditional robots often rely on rigid metallic components, which limit their ability to perform complex, flexible movements and interact safely with humans. In contrast, soft robotics leverages flexible materials like rubber and silicone to pursue more bio-inspired movements and adaptability. However, to maximize the performance of soft robots, it has been essential to develop ‘smart materials’ that can autonomously generate and control movement, rather than solely depending on external actuators. Materials with artificial muscle-like functions are particularly promising for significantly increasing the design freedom of soft robots.
Harvard’s Innovation in 3D-Printed Artificial Muscles
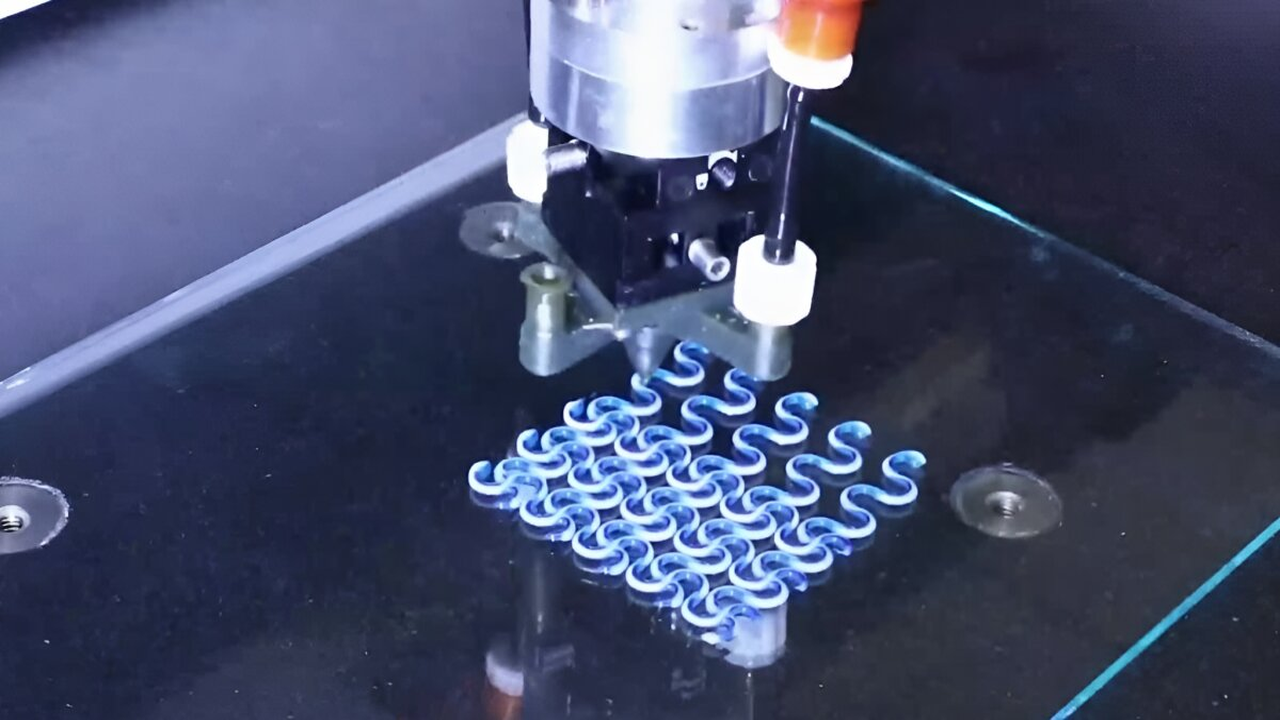
Addressing these challenges, a research team at Harvard’s John A. Paulson School of Engineering and Applied Sciences has developed a groundbreaking 3D printing technology. They have created filamentary materials capable of mimicking artificial muscle action. This material is synthesized by combining two key components:
- Active Liquid Crystal Elastomer (LCE): This is a smart polymer whose molecular orientation changes upon heating, causing it to contract or expand in programmed directions. This allows the material itself to generate active, muscle-like movements.
- Passive Elastomer: This acts as a stabilizer, controlling the movement of the LCE and suppressing unwanted deformations. This passive layer provides structural constraints to the active LCE, enabling the realization of specific, complex motion patterns.
The 3D printing system precisely arranges and layers both elastomers, directly programming intricate movements into the filamentary material. This achieves ‘material intelligence,’ where the material itself acts as an actuator, rather than requiring the assembly of separate components.
Technical Significance and Future Outlook
This 3D-printable artificial muscle is expected to profoundly impact the field of soft robotics. While conventional soft robots often rely on external actuation mechanisms such as pneumatic or hydraulic systems, this new material enables the construction of lighter, structurally simpler, and more energy-efficient systems. Future applications are anticipated in areas such as:
- Adaptive Soft Robotic Grippers: Grippers capable of gently yet firmly grasping objects of various shapes and compliance.
- Biomedical Devices: Flexible endoscopes that operate within the body, wearable sensors, or actuation components for artificial organs.
- Shape-Morphing Robotic Systems: Chameleon-like or exploration robots that can autonomously change their form in response to environmental cues.
- Smart Textiles: Intelligent clothing that can alter its breathability or shape in response to temperature changes or external stimuli.
This technology represents a significant step towards enabling robots to integrate more naturally into human society, achieving safe and effective interactions. The convergence of materials science and robotics promises a future where autonomous systems with unprecedented functionalities emerge rapidly.
Source: https://newatlas.com/robotics/3d-printing-robots-human-like-muscles/







Comments