Background: Shape Change in Liquid Crystal Elastomers and Geometric Constraints
Liquid crystal elastomers (LCEs), known as “smart materials,” are expected to have diverse applications in soft robotics, artificial muscles, and self-folding structures due to their ability to undergo large, reversible shape changes in response to external stimuli like heat, light, and electric fields. LCE shape changes are driven by the reorientation of internal liquid crystal molecules (mesogens). However, especially in bulk LCEs (materials with significant three-dimensional thickness), achieving complex 3D shape changes often leads to the accumulation of internal stress and strain—a phenomenon known as geometric frustration. This has hindered the free shape change of LCEs and limited their performance. Most prior research has focused on thin LCE sheets, where shape change is relatively easier to control.
Key Findings: Formulating 3D Director Fields for Unfrustrated Shape Change
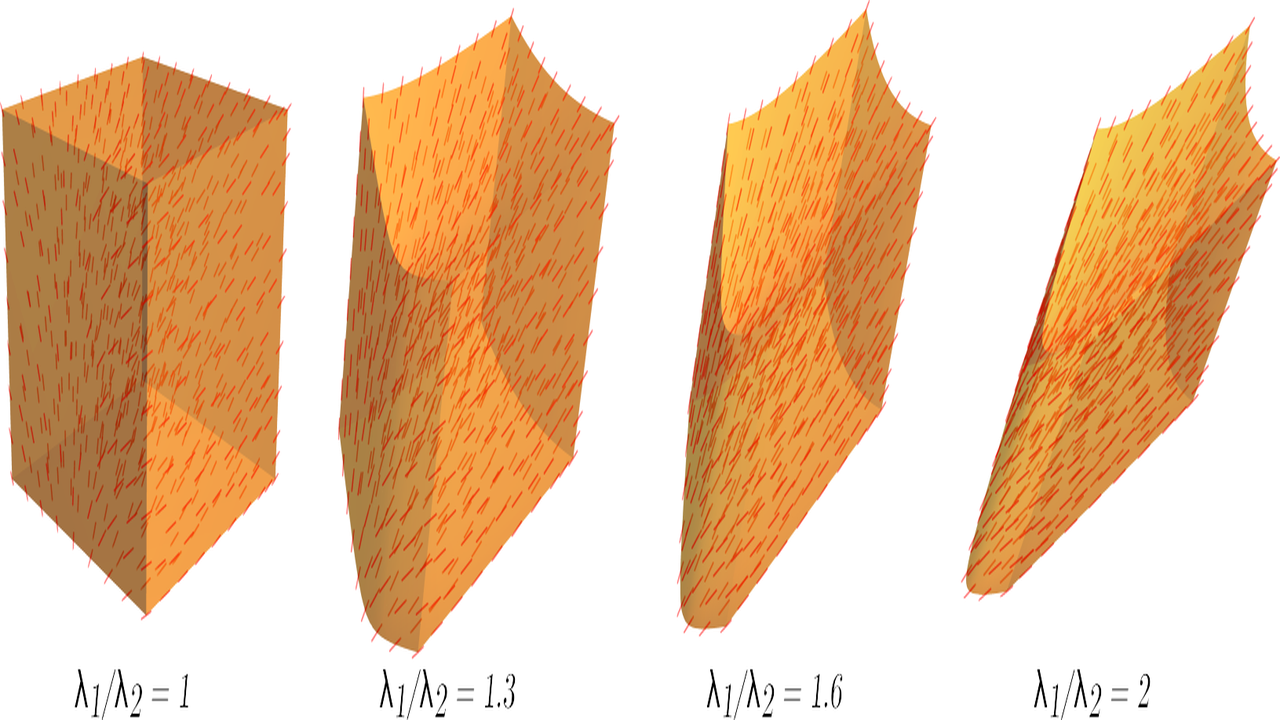
The research presented in this arXiv preprint explores a novel geometric approach to enable “unfrustrated self-morphing” in bulk liquid crystal elastomers. The research team meticulously analyzed how the “director field,” which describes the orientation pattern of liquid crystal molecules within the LCE, influences the material’s shape change. They identified a family of ideal director fields (3D nematic director fields) that allow LCEs to self-morph into desired three-dimensional shapes without accumulating internal stress. Specifically, by examining the concept of “Ricci curvature” from Riemannian geometry, they for the first time clearly formulated the minimal mathematical conditions that a 3D nematic director field must satisfy to undergo stress-free, i.e., geometrically unfrustrated, deformation. This establishes a theoretical foundation for achieving free shape change without external constraints, by precisely designing the internal molecular orientation of the material.
Technical Significance and Outlook
This research brings a groundbreaking advancement to the design and application of bulk liquid crystal elastomers. With the establishment of design principles for director fields that avoid geometric frustration, soft robots and artificial muscles will be able to achieve more complex and natural movements with higher efficiency and durability. For example, this will accelerate the development of multi-degree-of-freedom actuators that combine more intricate bending, twisting, and elongation, or smart structures that form specific three-dimensional geometries through self-assembly. This theoretical framework is directly applicable to LCE design optimization, providing crucial guidance to maximize the material’s potential. In the future, building upon this insight, a diverse range of next-generation smart materials with unprecedented functionalities—such as medical devices (e.g., implantable soft robots), wearable devices, smart textiles, or dynamically changing architectural materials—are anticipated. Stress-free deformation also contributes to extended material lifespan, marking a significant step towards practical implementation.







Comments